1アクチュエータ・スケートボード・ロボット
2次元平面内を車輪移動するには,例えば自動車のようにアクセル/ブレーキ(加減速)とハンドル(車輪旋回),もしくは左右の車輪を速度差をつけて同時駆動する,といったように,通常2つの入力(モータ)が必要です.これを一つのモータで可能にしたのがこの研究です.
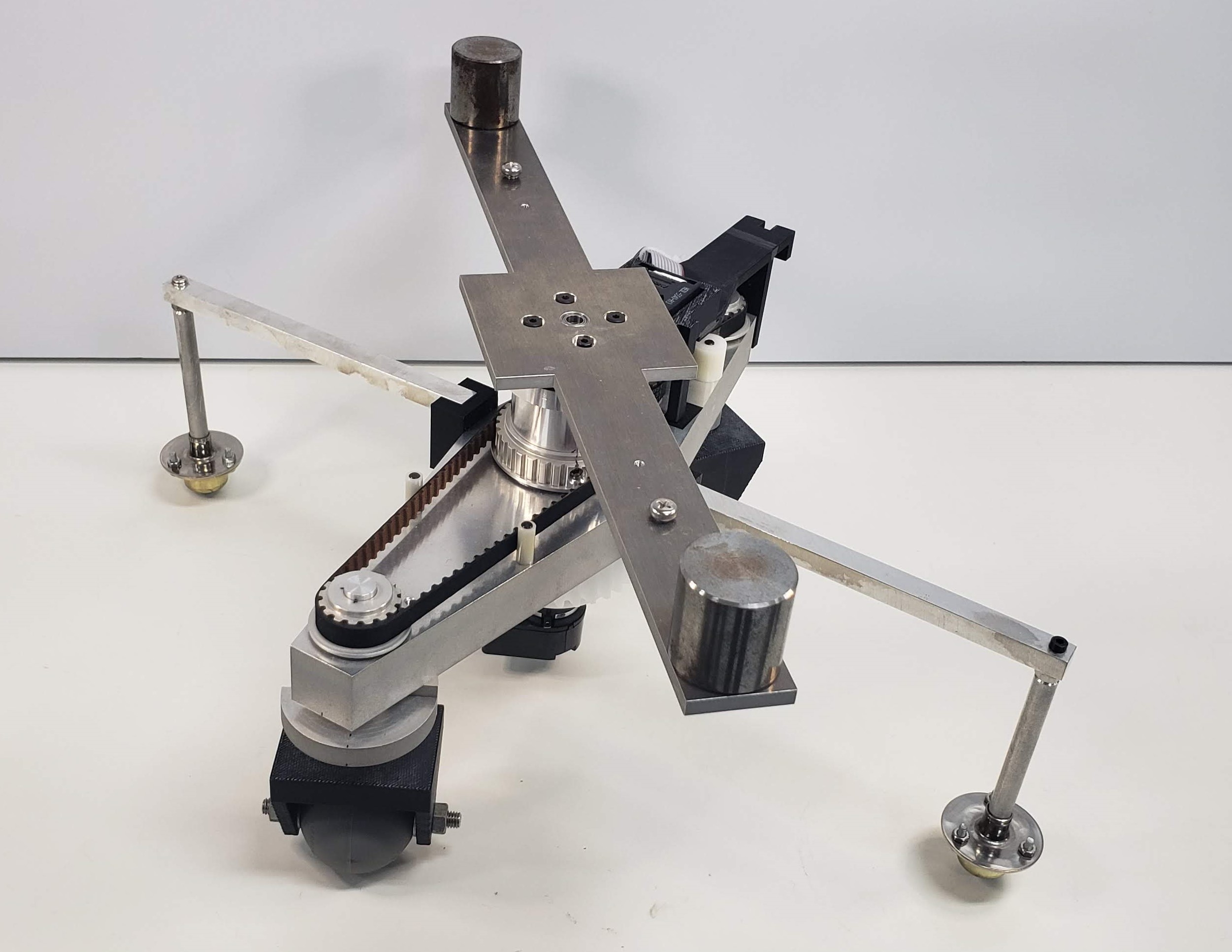
実現には,2輪スケートボード(スネークボード)の推進方法を参考にしました.スネークボードは自由旋回する受動車輪(キャスター)がボードの前後に2つずつけられています.例えば前輪を左,後輪を右に少し旋回させて状態を右側に振り戻すと左に旋回しながら前進し,右側に振った状態を左側に振り返すときに前輪を右,後輪を左に旋回させると右に旋回しながら前進します.
したがって,前後輪の旋回と上体の動きを一つのモータで動かせるようにカップリングしました.しかし,先後輪は方向を一定に保ってほしいのにもかかわらず,上体は回転半力を得るように動かし続けたいという相反する要求があり,単純なカップリングではその要求は満たせません.これを1号機はトルクリミッタ―を導入することで解決しました.
直進
直進(上から)
旋回
目標地点到達
しかし,トルクリミッタは大きなトルクが働くを空転する安全装置のような特殊な機械部品です.このような特殊な部品を用いず,どこでも手に入る汎用的な部品で機器を構成することが,造り易さの観点から重要です.そこで,2号機はトルクリミッタを用いることなく,スネークボードの推進方法を一つのモータで実現しました.
関連論文
- 論文掲載:日本AEM学会誌
- Publication: Journal of the Japan Society of Applied Electromagnetics and Mechanics
- 論文発表:IEEE/SICE SII2020
- Presentation:IEEE/SICE SII2020 in Honolulu
- 論文掲載:Robotics and Autonomous system
- "Robotics and Autonomous system" published our paper.
- JST:新技術説明会
- The presentation at "New Technology Presentation Meetings" organized by JST.
- "Journal of Intellegent & Robotics Systems" accepted our paper.
- "Journal of Intellegent & Robotics Systems" accepted our paper.